L’Université de Sherbrooke a récemment vibré au rythme des Rendez-vous branchés au travail lors desquels le professeur en génie électrique et génie informatique, Denis Gingras, a abordé la prochaine transition qui guette le secteur de la mobilité : le passage de la voiture électrique aux véhicules autonomes.
Le directeur du Laboratoire en intelligence véhiculaire de l’Université de Sherbrooke a souligné une distinction importante, à savoir que l’électrification permettait d’améliorer l’aspect environnemental du véhicule tandis que l’automatisation de la conduite vise à réduire le nombre d’accidents automobiles sur les routes et l’optimisation des déplacements.
 En effet, l’erreur humaine cause 93 % des accidents, mais déjà les systèmes avancés d’aide à la conduite (Advance Driver Assistance Systems, ADAS) secondent les conducteurs et contribuent à réduire le nombre de collisions, a soulevé le professeur Gingras. Les ADAS actuels incluent le contrôle ou la vibration du volant, le frein automatique, le message d’alerte sur écran ainsi que le signal sonore.
En effet, l’erreur humaine cause 93 % des accidents, mais déjà les systèmes avancés d’aide à la conduite (Advance Driver Assistance Systems, ADAS) secondent les conducteurs et contribuent à réduire le nombre de collisions, a soulevé le professeur Gingras. Les ADAS actuels incluent le contrôle ou la vibration du volant, le frein automatique, le message d’alerte sur écran ainsi que le signal sonore.
Il a cependant rappelé que l’automatisation complète du véhicule n’est pas pour demain : « La communication véhiculaire prend du temps à se développer, la technologie doit arriver à maturité, il faudra une acceptation sociale et des emplois pour la fabrication et la réparation de ces véhicules; leur déploiement ne sera pas avant 20, voire 30 ans, vers 2050 », estime-t-il.
Intelligence artificielle
Pour sa part, le véhicule autonome doit être capable de percevoir et d’analyser son environnement, de décider la route à emprunter pour atteindre sa destination, d’exécuter les manœuvres de conduite nécessaires. « Il ne dépend plus de l’humain pour conduire, toute personne à bord est considérée comme un passager », résume Denis Gingras.
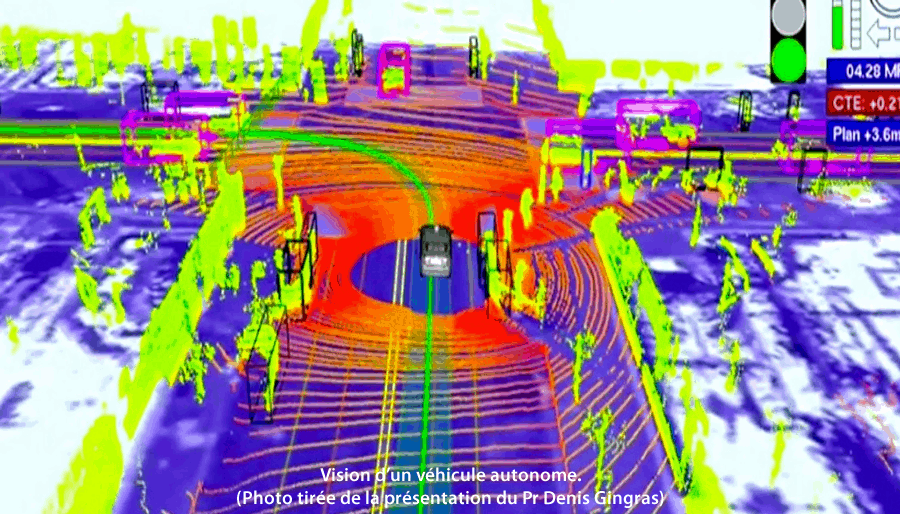
Selon lui, il reste encore beaucoup de travail à faire avant qu’un véhicule puisse prendre des décisions en fonction de son environnement et de l’évaluation du risque. « L’intelligence artificielle reste à un état de développement rudimentaire malgré l’avancement de l’apprentissage profond (deep learning) qu’on entend dans les médias. » Dans les capteurs qui soutiendront l’automatisation du véhicule, notons le GPS, les compas et l’odomètre, les réseaux de capteurs embarqués du véhicule, les caméras sous différents angles, les scanneurs laser LIDAR tant pour détecter les objets mobiles que fixes.
« La conduite est l’une des tâches les plus complexes pour l’être humain, ce n’est pas pour rien qu’on attend à 16 ans pour l’accès au permis de conduire. Il faut développer un véhicule qui a l’instinct de survie inné et une conscience écologique. Les défis d’opération du véhicule autonome sont multiples, comme l’interprétation des pseudocouleurs, l’adaptation à la vision de nuit, aux reflets du soleil, aux aléas de la météo, et ainsi de suite », a exposé le chercheur.
Enfin, le cout des prototypes de véhicules autonomes est encore beaucoup trop élevé – à 350 000 $ – pour être accessible au grand public, ajoute le professeur Gingras. Il s’attend également à ce qu’il y ait une transformation du modèle d’affaires automobile vers un service de mobilité, avec des taxis robots offrant du transport public, et que les concessionnaires soient prêts à prendre la responsabilité en cas d’accident du véhicule.
Toutes ces questions viendront freiner le développement du véhicule autonome, qui deviendra toutefois un incontournable d’ici trois décennies.
![]()
